Abstract
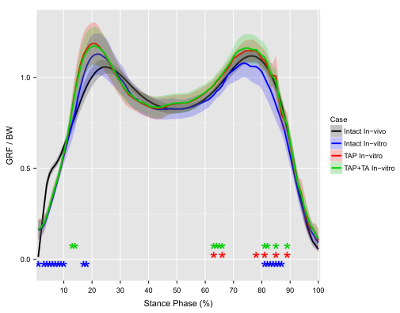
In vitro gait simulations are a preferential platform to study new intervention techniques or surgical procedures as they allow studying the isolated effect of surgical interventions. Commonly, simulations are performed by applying pre-defined setpoints for the kinetics and kinematics on all degrees of freedom (DOFs) of the cadaveric specimen. This however limits the applicability of the experiment to simulations for which pre-defined kinematics and kinetics can be measured in vivo. In this study we introduce inertial control as a new methodology for gait simulations that omits the need for pre-defined setpoints for the externally applied vertical ground reaction force (vGRF) and therefore allows the effect of interventions to be reflected upon it. Gait simulations of stance (1s) were performed in 10 cadaveric specimens under three clinically relevant conditions: native ankle, total ankle prosthesis (TAP) and total ankle prosthesis plus triple arthrodesis (TAP+TA). In the native ankle, simulated vGRF was compared against the vGRF measured in vivo in 15 healthy volunteers and high correlations were found (R(2)=0.956, slope of regression line S=1.004). In TAP and TAP+TA, vGRF changed, therefore confirming the sensitivity of the method to kinematic constrains imposed with surgery. Inertial control can replicate in vivo kinetic conditions and allows investigating the isolated effect of surgical interventions on kinematic as well as kinetics.