Gait simulator
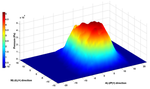
One of the most important aspects for my PhD work, it was performing a series of experiments to better understand the biomechanics of the human foot. There are several non-invasive techniques that can be used with patients to measure biomechanically related signals of the foot. However, when interested in intrinsic signals (e.g. how does the pressure distribution in the join look like), we are rather stuck. Normally, measuring such signals would require the insertion of sensors in the areas of interest. You can imagine that this can be a rather painful experience that we want to avoid.
This is the reason why in my lab we used something that is as close as possible to a human alive foot: cadavers. Cadavers have been used for understanding the human body functions for centuries. So, even though it might sound like a ‘weird’ way of researching in biomechanics, it is actually very common and really useful. Cadavers from kind donors are the closest thing we have to alive human tissues and we can use them in very interesting ways to perform research. In the case of the foot, using cadavers we can have a very clear picture of the anatomy and all the tissues. However it is a bit difficult to understand how the foot behaves dynamically.
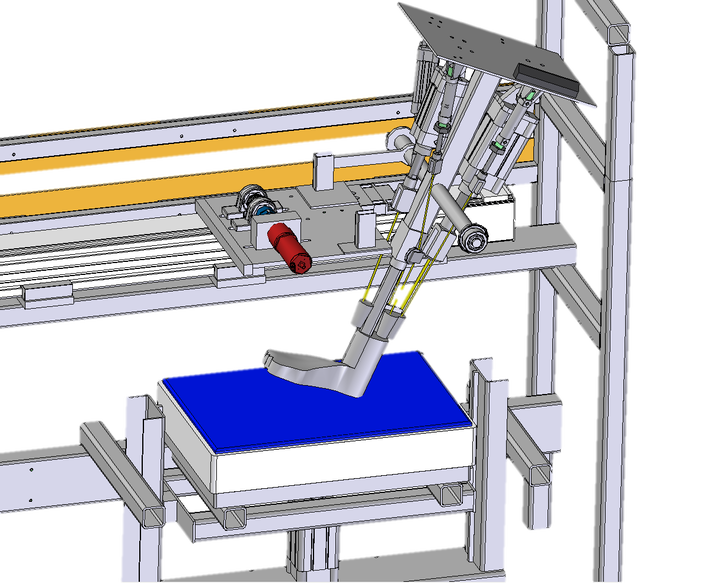
The solution: build a machine that can simulate gait (i.e. walking pattern) on cadaveric specimens. And that’s exactly what we did in the Biomechanics section at KU Leuven. The project started sometime in the mid-2000s as a Master thesis, but it progressed over the years to be a fully functional and automated cadaveric gait simulator. At the time of the writing the setup is able to:
- Perform gait simulations within one second, which makes it the fastest gait simulator described in literature. For reference, the normal walking speed of a healthy person is 0.6-0.8 seconds.
- During the simulations, the actuation of 6 muscle groups is controlled dynamically according to a pre-defined pattern. The pattern is derived from measurements of healthy volunteers.
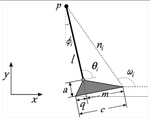
- The kinematics imposed are calculated based on a model that takes into account the dimensions of the specimen
- Furthermore, a control mechanism is used to make sure that the simulations will be physiologic, even if the biomechanics of the foot change e.g. in the case of surgical procedure.
- The preparation and performance of the simulations is totally automated and one the specimen is fixed on the simulatore, no human interference is required
- The system is synchronised with other measurement devices that perform additional measurements.
This is how the simulations look like (slow-motion video)
Until now we have used this system in various studies that have been published in peer-reviewed journals (see publications).

Since 2015, the Gait Simulator is part of the Flanders Institute for Biomechanical Experimentation (FIBEr). FIBEr is a core facility of KU Leuven with expertise on the mechanical and microstructural characterization of biological tissues and biomedical products. Our portfolio of testing devices is unique in Europe, facilitating a variety of biomechanical tests at different length scales, mimicking the in vivo conditions as closely as possible, and according to the highest standards. We strongly believe that our tests are a necessary step in your market entrance in line with the new medical device regulation.
Publications
Hindfoot kinematics and kinetics - A combined in vivo and in silico analysis approach
The role of medial ligaments and tibialis posterior in stabilising the medial longitudinal foot arch: a cadaveric gait simulator study
Augmented Ligament Reconstruction Partially Restores Hindfoot and Midfoot Kinematics After Lateral Ligament Ruptures
Foot-ankle simulators: A tool to advance biomechanical understanding of a complex anatomical structure
Insertion of a pressure sensing array minimally affects hindfoot bone kinematics
Extrinsic muscle forces affect ankle loading before and after total ankle arthroplasty
Inertial control as a novel technique for in vitro gait simulations
An in vitro approach to the evaluation of foot-ankle kinematics: performance evaluation of a custom-built gait simulator.
In vitro analysis of muscle activity illustrates mediolateral decoupling of hind and mid foot bone motion
Specimen-specific tibial kinematics model for in vitro gait simulations